 Od padesátých let 20. století si odborníci na umělou inteligenci strojů lámali hlavu, jak přimět stroje k činnostem, které byly tradičně chápány jako projevy lidské inteligence. Dlouho převládalo přesvědčení, že cesta k takovému cíli vede přes zvyšování operační rychlosti počítačů. Chyba lávky.
Změna přišla koncem sedmdesátých let. Tehdy začalo velice produktivní období výzkumu tzv. znalost-ních systémů, tedy soustav programů uzpůsobených k uložení velkého množství dat (zkušeností) z různých oblastí techniky. Programy robotovi umožňovaly tyto zkušenosti účelně využívat k řešení problémů, které by jinak museli řešit úzce zaměření specialisté a i jim by to zabralo spoustu času. Takovýto systém na rozdíl od člověka na nic nezapomene, není nesoustředěný, nezná stres a je rychlejší.
Od padesátých let 20. století si odborníci na umělou inteligenci strojů lámali hlavu, jak přimět stroje k činnostem, které byly tradičně chápány jako projevy lidské inteligence. Dlouho převládalo přesvědčení, že cesta k takovému cíli vede přes zvyšování operační rychlosti počítačů. Chyba lávky.
Změna přišla koncem sedmdesátých let. Tehdy začalo velice produktivní období výzkumu tzv. znalost-ních systémů, tedy soustav programů uzpůsobených k uložení velkého množství dat (zkušeností) z různých oblastí techniky. Programy robotovi umožňovaly tyto zkušenosti účelně využívat k řešení problémů, které by jinak museli řešit úzce zaměření specialisté a i jim by to zabralo spoustu času. Takovýto systém na rozdíl od člověka na nic nezapomene, není nesoustředěný, nezná stres a je rychlejší.
PATŘÍ ČAPKŮM
Slovo robot, které se dnes používá snad ve všech jazycích, je českého původu. Poprvé ho použil český spisovatel Karel Čapek ve svém dramatu RUR. Autorem tohoto slova je však Josef Čapek, jenž ho do zmiňovaného bratrova dramatu vymyslel, když společně hledali výstižný termín pro umělého tvora.
FILMOVÍ HRDINOVÉ
 Roboti se mnohokrát objevili i na stříbrném plátně. Jistě si vzpomenete na Číslo pět žije či na Andrewa - člena naší rodiny (z tohoto filmu jsou i naše obrázky). Nejnovějším přírůstkem ve videopůjčovnách je film Stevena Spielberga A.I. - umělá inteligence. Zajímavé je, že společným rysem všech těchto snímků je hluboká lidskost hlavních hrdinů a jejich ohromná touha podobat se co nejvíce svému stvořiteli.
Roboti se mnohokrát objevili i na stříbrném plátně. Jistě si vzpomenete na Číslo pět žije či na Andrewa - člena naší rodiny (z tohoto filmu jsou i naše obrázky). Nejnovějším přírůstkem ve videopůjčovnách je film Stevena Spielberga A.I. - umělá inteligence. Zajímavé je, že společným rysem všech těchto snímků je hluboká lidskost hlavních hrdinů a jejich ohromná touha podobat se co nejvíce svému stvořiteli.
ATTILA A HANIBAL
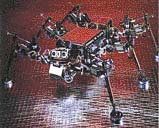 Po úspěšné realizaci Genghise pokračoval výzkum vývojem šestinohých robotů Attily a Hanibala za podpory NASA a vojenského námořnictva. "Narodili se" v červnu 1991. Základním požadavkem kladeným na oba tyto roboty byla schopnost překonávat nerovný terén, protože měli být použiti při planetárním výzkumu.
Po úspěšné realizaci Genghise pokračoval výzkum vývojem šestinohých robotů Attily a Hanibala za podpory NASA a vojenského námořnictva. "Narodili se" v červnu 1991. Základním požadavkem kladeným na oba tyto roboty byla schopnost překonávat nerovný terén, protože měli být použiti při planetárním výzkumu.
O AUTOROVI
Skupinu mobilní robotiky na pražské vysoké škole ČVUT založil v roce 1991 autor tohoto článku, Doc. Ing. Pavel Nahodil, CSc. Český tým odborníků bádá zejména v oblasti malých mobilních autonomních robotů s vrstvenou architekturou řídicího systému. Své návrhy experimentálně vyzkoušeli na kráčivém robotu jménem Marvin, při jehož konstrukci se inspirovali v přírodě.

Jednodušší cesta
Výzkum v oblasti inteligentních robotů nás paradoxně přivedl k poznání, že ne každá činnost, o níž jsme se domnívali, že vyžaduje lidskou inteligenci, ji skutečně vyžaduje. Někdy postačí vhodně, a hlavně rychle zareagovat na danou situaci. Takto rutinně se chováme mnohem častěji, než jsme ochotni si přiznat. Také u robotů často stačí, když ve standardních situacích jednají rutinně. Tito tzv. reaktivní roboti se ukázali v mnohých oblastech jako plně vyhovující. Jejich konstrukce je přitom jednodušší, jsou spolehlivější a také mnohem levnější, než kdyby byli vybaveni složitým softwarem tradiční umělé inteligence.
Přesně podle
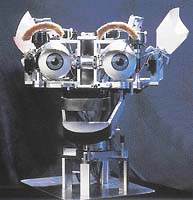
 Tradiční robot někdy i desítky minut stál a propočítával všechny možné varianty, než se pohnul kousek kupředu. Na základě údajů, které mu dodaly jeho umělé smysly - oči (stereotaktické kamery) či prsty (hmatová čidla), určil co nejpřesněji předměty, jež mu přijdou do cesty. Získané informace přiřazoval k symbolům uloženým v počítačovém mozku, podobně jako člověk, který uvidí stůl a vzápětí si pomyslí "to je stůl". Následně si robot vytvořil co nejpřesnější mapu toho, co vnímal, naplánoval bezpečný kurs kolem překážky a nakonec zvážil, jak nejúčelněji nastavit aktuátory (články noh, kola nebo jiné pohybové ústrojí). Teprve pak vydala řídicí jednotka motorům povely a robot se dal do pohybu.
Celý tento proces je i s dnešními rychlými procesory velmi náročný a zdlouhavý, nehledě na to, že na nečekané překážky nedokáží tito roboti reagovat vůbec.
Tradiční robot někdy i desítky minut stál a propočítával všechny možné varianty, než se pohnul kousek kupředu. Na základě údajů, které mu dodaly jeho umělé smysly - oči (stereotaktické kamery) či prsty (hmatová čidla), určil co nejpřesněji předměty, jež mu přijdou do cesty. Získané informace přiřazoval k symbolům uloženým v počítačovém mozku, podobně jako člověk, který uvidí stůl a vzápětí si pomyslí "to je stůl". Následně si robot vytvořil co nejpřesnější mapu toho, co vnímal, naplánoval bezpečný kurs kolem překážky a nakonec zvážil, jak nejúčelněji nastavit aktuátory (články noh, kola nebo jiné pohybové ústrojí). Teprve pak vydala řídicí jednotka motorům povely a robot se dal do pohybu.
Celý tento proces je i s dnešními rychlými procesory velmi náročný a zdlouhavý, nehledě na to, že na nečekané překážky nedokáží tito roboti reagovat vůbec.
Spontánní reakce
Profesor Rodney Brooks z Massachusetts Institut of Technology (MIT) vykročil novou cestou. Odmítl tuto čistě lidskou předlohu chování a místo na "myšlení" vsadil na "spontánní reflexy", kterými jsou vybaveny i nejjednodušší formy života (např. hmyz se dokáže pohybovat rychle a bez problémů vyhledává cíle, přestože nemá téměř žádný mozek). Senzory (čidla) a aktuátory Brooksových tzv. "hmyzích robotů" jsou vždy propojeny přímo. Jakmile např. hmatový senzor v noze robota ucítí překážku, dá motoru povel ke zpětnému chodu, aniž by přitom byly nutné jakékoliv výpočty. Robot přitom nevyhodnocuje, o jaký druh překážky jde, dokonce o překážkách nemá ani žádné předběžné údaje. S jednoduchým programem chování na ně však dokáže bezprostředně a většinou také naprosto správně reagovat. Takovému chování se však musel nejprve naučit. Jednak metodou pokusů a omylů, jednak radami svých tvůrců a také nastavením speciálních DNA šablon.
Komplexy jednání
 Brooksovi roboti nejsou efektivní pouze díky technickému vybavení (hardwaru), ale především díky programům. V nich je vždy řada po sobě jdoucích příkazů složena v soubor. Nejprostším souborem je pokyn "vstaň ihned po zapnutí". Následuje soubor příkazů "chůze", "zvedání nohou před překážkami" a např. "sledování zdrojů tepla". Tyto soubory (komplexy) jsou hierarchicky uspořádány do vrstev podle důležitosti. Každý komplex dovoluje nerušený průběh komplexů podřízených. Při určitých signálech, které zachytí senzory, jsou však podřízené komplexy dočasně vyřazeny. Je-li třeba se někam přesunout, je aktivován pouze komplex "chůze". Při střetu s překážkou se spouští nejbližší vyšší komplex "zvedání nohou" a komplex "chůze" je krátkodobě "mimo hru". Po zdolání překážky se opět oživí "chůze". Pokud se robot při překonávání překážky překotí, aktivuje se nejprve "vstávání", podobně jako u skutečného brouka.
Toto rozvrstvení komplexů jednání, které Brooks nazval "architekturou podřízenosti", má velikou výhodu - lze ho rozšiřovat směrem nahoru o další vrstvy komplexů, aniž by přitom robot zapomněl základní "životně důležité" instinkty. Takoví roboti jsou v jednání pružní a chybují minimálně. Nedokáží-li něco jedním způsobem, zkoušejí to podle jiných modelů jednání. Proti tomu klasičtí roboti, kteří bezvadně vykonávají všechny úkoly podle předem naprosto přesného programu, si v nečekané situaci najednou "nevědí rady".
Brooksovi roboti nejsou efektivní pouze díky technickému vybavení (hardwaru), ale především díky programům. V nich je vždy řada po sobě jdoucích příkazů složena v soubor. Nejprostším souborem je pokyn "vstaň ihned po zapnutí". Následuje soubor příkazů "chůze", "zvedání nohou před překážkami" a např. "sledování zdrojů tepla". Tyto soubory (komplexy) jsou hierarchicky uspořádány do vrstev podle důležitosti. Každý komplex dovoluje nerušený průběh komplexů podřízených. Při určitých signálech, které zachytí senzory, jsou však podřízené komplexy dočasně vyřazeny. Je-li třeba se někam přesunout, je aktivován pouze komplex "chůze". Při střetu s překážkou se spouští nejbližší vyšší komplex "zvedání nohou" a komplex "chůze" je krátkodobě "mimo hru". Po zdolání překážky se opět oživí "chůze". Pokud se robot při překonávání překážky překotí, aktivuje se nejprve "vstávání", podobně jako u skutečného brouka.
Toto rozvrstvení komplexů jednání, které Brooks nazval "architekturou podřízenosti", má velikou výhodu - lze ho rozšiřovat směrem nahoru o další vrstvy komplexů, aniž by přitom robot zapomněl základní "životně důležité" instinkty. Takoví roboti jsou v jednání pružní a chybují minimálně. Nedokáží-li něco jedním způsobem, zkoušejí to podle jiných modelů jednání. Proti tomu klasičtí roboti, kteří bezvadně vykonávají všechny úkoly podle předem naprosto přesného programu, si v nečekané situaci najednou "nevědí rady".
Schopnost učit se
Spontánní roboti jsou skutečně v mnohém podobní jednoduchým živočichům, proto se moderní robotika stále více propojuje s biologií. Kromě základního reflexivního jednání mají roboti také schopnost učit se. Jak se komplikuje prostředí, jejich úkoly a poslání, tak se postupně doplňuje i jejich chování. Mění se způsob jejich "myšlení" (tzv. architektura), aby obstáli ve složitějších situacích, a postupně získávají schopnost "rozumět" příkazům. Ty pak plní mnohem spolehlivěji, než kdyby je získali od svých programátorů předem. Proto lze říct, že mobilní inteligentní robot (mobot) je "živočich", sice uměle stvořený člověkem, ale skoro stejně pohyblivý (mobilní) a pohybující se v tomtéž světě. Živým tvorům se podobá především svým chováním a podobně jako oni má svůj "mozek" - počítač.
Umělý život ve skupině
 Pokud je stejných mobotů více, může se vyvíjet společenství, ve kterém mezi roboty dochází ke vzájemným vztahům a spolupráci. Řada problémů, jimiž se konstruktéři mobotů zabývají, je nějakým způsobem řešena i v přírodě. Je tedy nutné principům chování zvířat porozumět a využít jich v technickém řešení.
Umělé stroje s výraznými rysy inteligence se vyvíjejí na řadě míst ve světě. Vědci pracují na vývoji robotů všestranných, schopných přežívat v různě složitých prostředích a situacích. Noví roboti nefungují jen podle strohých a neměnných matematických postupů, ale i na základě stále se vyvíjejících "emocí" - mají své vlastní ego, potřeby a vrtochy. Učí se chování, kterým živí tvorové reagují na nepředvídatelné situace. Pro takovéto snahy uměle vytvořit některé přírodní procesy se začátkem devadesátých let vžilo souhrnné označení "umělý život". Pro vědce je poutavý i díky nové metodě vytváření programů, tzv. genetickému programování. Ta totiž zpochybňuje vžitou představu, že počítače dovedou pouze to, co jim přesně napíšeme v podobě programu.
Pokud je stejných mobotů více, může se vyvíjet společenství, ve kterém mezi roboty dochází ke vzájemným vztahům a spolupráci. Řada problémů, jimiž se konstruktéři mobotů zabývají, je nějakým způsobem řešena i v přírodě. Je tedy nutné principům chování zvířat porozumět a využít jich v technickém řešení.
Umělé stroje s výraznými rysy inteligence se vyvíjejí na řadě míst ve světě. Vědci pracují na vývoji robotů všestranných, schopných přežívat v různě složitých prostředích a situacích. Noví roboti nefungují jen podle strohých a neměnných matematických postupů, ale i na základě stále se vyvíjejících "emocí" - mají své vlastní ego, potřeby a vrtochy. Učí se chování, kterým živí tvorové reagují na nepředvídatelné situace. Pro takovéto snahy uměle vytvořit některé přírodní procesy se začátkem devadesátých let vžilo souhrnné označení "umělý život". Pro vědce je poutavý i díky nové metodě vytváření programů, tzv. genetickému programování. Ta totiž zpochybňuje vžitou představu, že počítače dovedou pouze to, co jim přesně napíšeme v podobě programu.
Evoluce robotů
V porovnání s biologií je zřejmé, že program se skutečně v určitém smyslu sám vyvíjí. Člověk žádný software podrobně nepíše, pouze vylučuje z dalších náhodných "mutací" (změn) programu nefunkční, "života neschopné" části. Těm úspěšnějším dává možnost stát se (přes náhodnou mutaci) ještě dokonalejšími. Takovéto programy se vkládají do paměti robotů, kteří se pohybují v měnícím se prostředí. Díky přeměnám programů se nejschopnější roboti dále vyvíjejí a jejich rozšířený a zdokonalený program se předává další generaci robotů (potomků), kteří program dále mutují a zdokonalují. Takže spíš než lidé, programují roboty jejich "individuální zkušenosti". Každého zvlášť a jedinečně.
Spolupráce v týmu
 Vědci vědí, že skupina jednoduchých robotů ovládaných "instinkty" zvládne i poměrně složité činnosti, kterých by jednotliví roboti nebyli samostatně schopni. Důkaz opět našli v přírodě u včel a mravenců. Američan Ron Arkin se na základě těchto zkušeností snažil přimět roboty k vzájemné spolupráci. Robotům simulovaným na počítači uložil úkol sbírat předměty rozházené na podlaze místnosti a odnášet je na určené místo. Roboti jednali podle stanovených vzorů - jeden je orientoval směrem k předmětu, druhý jim umožňoval vyhnout se překážce. Do jejich chování tvůrce vložil také prvky náhodnosti. Pokud hledaný předmět nebyl v detekčním poli robota, robot náhodně vyhledával - slídil. Zároveň také reagoval na signály kolegů v okamžiku, kdy směřovali k předmětu a sbírali ho. Jakmile se sledovaný předmět objevil i v jejich detekčním poli, automatika je přepnula na sledování. Tak se zabránilo slídění robota v situaci, kdy mohl být užitečnější při spolupráci na sběru, který již začal jiný robot. A výsledek? O třetinu rychlejší čas než roboti bez těchto vlastností. Následně Arkin pokus úspěšně zopakoval se skutečnými roboty.
Vědci vědí, že skupina jednoduchých robotů ovládaných "instinkty" zvládne i poměrně složité činnosti, kterých by jednotliví roboti nebyli samostatně schopni. Důkaz opět našli v přírodě u včel a mravenců. Američan Ron Arkin se na základě těchto zkušeností snažil přimět roboty k vzájemné spolupráci. Robotům simulovaným na počítači uložil úkol sbírat předměty rozházené na podlaze místnosti a odnášet je na určené místo. Roboti jednali podle stanovených vzorů - jeden je orientoval směrem k předmětu, druhý jim umožňoval vyhnout se překážce. Do jejich chování tvůrce vložil také prvky náhodnosti. Pokud hledaný předmět nebyl v detekčním poli robota, robot náhodně vyhledával - slídil. Zároveň také reagoval na signály kolegů v okamžiku, kdy směřovali k předmětu a sbírali ho. Jakmile se sledovaný předmět objevil i v jejich detekčním poli, automatika je přepnula na sledování. Tak se zabránilo slídění robota v situaci, kdy mohl být užitečnější při spolupráci na sběru, který již začal jiný robot. A výsledek? O třetinu rychlejší čas než roboti bez těchto vlastností. Následně Arkin pokus úspěšně zopakoval se skutečnými roboty.
Farma na instinkty
Na základě zkušeností, že roboti mohou předávat mutovaný program z generace na generaci a dovedou pracovat v týmu, se zrodila myšlenka robotí farmy, na které by se "pěstovaly" robotí instinkty. Programy těch nejlepších "chovanců" by se staly základem vrozeného genetického kódu další generace robotů - podobně jako v přírodě podle zákona přirozeného výběru. Vědci, kteří se takovým výzkumem zabývají, tzv. darwinovci, pracovali na počítačových modelech, v nichž se tisíce a tisíce generací organismů rodí, učí se, bojují o přežití, navozují partnerské vztahy, spolupracují a umírají. A to vše během několika dnů a nocí. Zde robotici začínají vracet biologům to, co si od nich na začátku vypůjčili. Někteří biologové si totiž od podobných počítačových modelů umělého života slibují výraznou pomoc při svých předpovědích růstu a mutací skutečných živých organismů (např. moskytů).
Roboděti
 Možná vás napadne, jak vlastně roboti na takových farmách navazují partnerské vztahy a k čemu takové vztahy jsou. Roboti se učí jednoduchým činnostem, např. sbírání pingpongových míčků. Přitom se musejí sami vypořádat s náhodnými a záludnými kombinacemi pořadí povelů. Dva nejúspěšnější roboti z týmu jsou pak jmenováni do funkce rodičů a vymění si mezi sebou náhodně části programů (jakési robotí mísení genů), což dává jejich potomkům možnost být lepší než jejich rodiče.
Úspěšná kombinace programu se vloží do mikroprocesorových mozků méně úspěšných jedinců. Ti, co obstojí v dalších kolech složitějších úkolů, se stávají základem pro novou generaci, která opět vydá ty nejlepší. Na konci cyklu vznikne kolonie umělých organismů, přizpůsobených co nejlépe danému úkolu a schopných výborně operovat v neznámém prostoru. Darwinovci jsou přesvědčeni, že jejich evoluční roboti se sami od sebe rozvinou a adaptují - podle přírodních zákonů vývoje primitivních živých organismů.
Pomyslnou Achillovou patou vývoje zatím zůstává cena: konstrukce inteligentních robotů je velmi drahá, a robotů proto málo. To do schématu přirozeného výběru vůbec nezapadá, neboť evoluce vyžaduje hromadnost. Jen tak lze vypěstovat kvalitní humanoidní roboty např. pro výzkum Marsu, likvidaci nebezpečných skládek či řízení vozidel na automatizovaných dálnicích.
Možná vás napadne, jak vlastně roboti na takových farmách navazují partnerské vztahy a k čemu takové vztahy jsou. Roboti se učí jednoduchým činnostem, např. sbírání pingpongových míčků. Přitom se musejí sami vypořádat s náhodnými a záludnými kombinacemi pořadí povelů. Dva nejúspěšnější roboti z týmu jsou pak jmenováni do funkce rodičů a vymění si mezi sebou náhodně části programů (jakési robotí mísení genů), což dává jejich potomkům možnost být lepší než jejich rodiče.
Úspěšná kombinace programu se vloží do mikroprocesorových mozků méně úspěšných jedinců. Ti, co obstojí v dalších kolech složitějších úkolů, se stávají základem pro novou generaci, která opět vydá ty nejlepší. Na konci cyklu vznikne kolonie umělých organismů, přizpůsobených co nejlépe danému úkolu a schopných výborně operovat v neznámém prostoru. Darwinovci jsou přesvědčeni, že jejich evoluční roboti se sami od sebe rozvinou a adaptují - podle přírodních zákonů vývoje primitivních živých organismů.
Pomyslnou Achillovou patou vývoje zatím zůstává cena: konstrukce inteligentních robotů je velmi drahá, a robotů proto málo. To do schématu přirozeného výběru vůbec nezapadá, neboť evoluce vyžaduje hromadnost. Jen tak lze vypěstovat kvalitní humanoidní roboty např. pro výzkum Marsu, likvidaci nebezpečných skládek či řízení vozidel na automatizovaných dálnicích.
Pohyb robotů
 Jedním z významných znaků robota, který určuje možnosti jeho nasazení, je způsob pohybu. Pro suchozemské pozemní roboty je nejpřirozenější pohyb na kolech. Lidstvo s ním má nejvíc zkušeností, a navíc je nejsnáze realizovatelný. Pro mnoho terénů (např. krátery sopek, povrch jiných planet) ale podvozky s koly nevyhovují. V takových případech se využívají jiné způsoby pohybu, většina z nich je však stále spíš předmětem výzkumu. Mezi nejrozšířenější patří kráčivé stroje.
Jedním z významných znaků robota, který určuje možnosti jeho nasazení, je způsob pohybu. Pro suchozemské pozemní roboty je nejpřirozenější pohyb na kolech. Lidstvo s ním má nejvíc zkušeností, a navíc je nejsnáze realizovatelný. Pro mnoho terénů (např. krátery sopek, povrch jiných planet) ale podvozky s koly nevyhovují. V takových případech se využívají jiné způsoby pohybu, většina z nich je však stále spíš předmětem výzkumu. Mezi nejrozšířenější patří kráčivé stroje.
Čeští robotici
K vývoji robotů a konkrétně kráčivých strojů mají co říci i Češi. Na katedře kybernetiky Českého vysokého učení technického (ČVUT) v Praze již jedenáct let funguje přední vědecká skupina Mobil Robot Group (MRG), která se zabývá řízením podvozků kráčivých strojů. O kvalitě svědčí i fakt, že jako jediné vysokoškolské pracoviště u nás získalo prestižní ocenění Evropské unie "Centrum Excelence - Miracle".
Tým vědeckých pracovníků se tu od samého počátku specializuje na vše, co souvisí s pohybem robota. Nejprve "přiměli" robota k pravidelné chůzi (vždy po dvou krajních nohách na jedné straně a prostřední noze na straně druhé) a postupně přešli ke složitější chůzi: krabí, koňské nebo švábí a k různým způsobům zatáčení. Nyní se výzkum soustřeďuje na umělý život. Pokud nemáte potíže s angličtinou, blíže se o projektech MRG dozvíte na internetových stránkách www.mrgroup.org.


ŠESTINOH GENGHIS
 První kráčivý robot, vyvinutý v týmu profesora Brookse, byl hexapod (šestinoh) Genghis. Měl poměrně jednoduchou a robustní konstrukci a byl bohatě vybaven senzory. Nyní je vystaven v National Air and Space Museum při Smithsonian Institute ve Washingtonu v USA.
První kráčivý robot, vyvinutý v týmu profesora Brookse, byl hexapod (šestinoh) Genghis. Měl poměrně jednoduchou a robustní konstrukci a byl bohatě vybaven senzory. Nyní je vystaven v National Air and Space Museum při Smithsonian Institute ve Washingtonu v USA.
BOADICEA
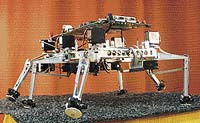
 Robot Boadicea byl vyvinut v Center for Design Research ve Stanfordu v USA a MIT s podporou NASA. Tento robot je podobně jako předchozí dva vytvořen podle přírodního vzoru, podle skutečného švába.
Má šest pneumaticky ovládaných nohou, řízení chůze je plně samostatné, realizované palubním počítačem. Pracovní prostory nohou se překrývají, čemuž se konstruktéři kráčivých robotů většinou snaží vyhnout, protože to značně zvyšuje nároky na řídicí systém robota. Výhodou však je schopnost překonávat vyšší překážky a dosahovat až dvojnásobné rychlosti chůze proti starším robotům Attila a Hanibal.
Robot Boadicea byl vyvinut v Center for Design Research ve Stanfordu v USA a MIT s podporou NASA. Tento robot je podobně jako předchozí dva vytvořen podle přírodního vzoru, podle skutečného švába.
Má šest pneumaticky ovládaných nohou, řízení chůze je plně samostatné, realizované palubním počítačem. Pracovní prostory nohou se překrývají, čemuž se konstruktéři kráčivých robotů většinou snaží vyhnout, protože to značně zvyšuje nároky na řídicí systém robota. Výhodou však je schopnost překonávat vyšší překážky a dosahovat až dvojnásobné rychlosti chůze proti starším robotům Attila a Hanibal.
INTERNET
Na internetu se můžete podívat na stránky MIT Artificial Intelligence Laboratory www.ai.mit.edu). Zde byl pod vedením R. Brookse vytvořen první kráčivý robot na světě - Hexapod Genghis. Za zhlédnutí stojí i tyto stránky: www.cyberlife-research.co.uk, www.aibo.com, grall.ip.rm.crn.it/evorobot.



